Well, as a part of this global communal consciousness...Not thats not it. As a human in a world where everyone else sees the same things, and also capable of just thinking, I am not reinventing the wheel, just keep finding out how other people were (of course!) working on a similar (ok exact) idea I thought of.
http://www.pulsar.org/archive/int/timswork/Legoglove.html
a person who seems to be much like me, a tinkerer with an idea. He just happened to have found a school to do it at, with a teacher and like 2 other students. Talk about totally sweet!
lets not forget hollywood...
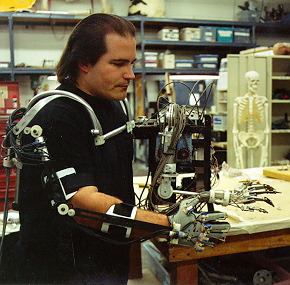
http://www.character-shop.com/images/armwaldo.jpg
and their prototype for a future full body version:
http://www.character-shop.com/images/bodwldo2.jpg
go here http://www.character-shop.com/waldo.html to read about them.
...
Found some interesting alternative (and MUCH simpler, if not cheaper) method of construction for my control glove. Only one question remains to be answered about this Bend Sensor http://www.imagesco.com/catalog/flex/FlexSensors.html is whether it can be shortened. Simple electronics teaches me that a reduced length will simple make a reduced resistance for the 0 degree position, but the same resistance curve (at least proportionate) as a full length. I'll fire off an email to someone here in a moment.
Probably this guy: http://www.pulsar.org/archive/int/timswork/dataglove.html#Figure2 because he has one already.
Except my slight advantage is that i want a computerless system, after programming my PIC that is. I'm gonna ask the forum guys who gave me the schematics and details for using a potentiometer/PIC/servo setup about using the bend sensors with the PIC instead of the pots. Pot's work on the same basis, resistance for position. Should be able to program the PIC for either. Using those bend sensors would be easier to mount on a glove interface than my orignal idea of using a wrist mounted pots connected to each joint by fishing line (actual connections to each joint i haven't actually figured out yet, i thought perhaps sewed in plastic ring so it won't rip out, and will leave room for my fingers to get in and out of the glove.
those Waldo's are pretty much exactly what i've been working on, though i assume MUCH much more expensive. Contracted by Disney? whew! Badass. I've thought of asking about how they keep limbs in position even when outside forces are applied, but i just realized having a powerful enough motor(servo) would work.
I have an idea for force feedback using those rather simple velostat pressure sensors hooked up to servos on the control glove (which would require some sort of skeleton on the control glove anyways) So by telemetrics i grasp a can with the android hand, and my control glove gets a little forcefeedback letting me know. I know it won't give me complete touchy feely, but it would be something to work with. Later on i can figure out how to deal with outside force that i would normally feel (ie say someone else moves a finger, i don't want my control glove feedback to break my finger, ya know? so how to get said moved finger back into position? I think a check system will be implemented later, something simple using the parts i already have, say robotfinger is moved, the info from a pot could be used to compare with the control glove pots to apply signal to the robothand servos until they match. Using those bendy sensors would make actual construction of all this REALLY easy instead of all the potentiometer -> fishingline -> harness stuff i was originally thinking. One could use the bend sensors in place of all of that so more time could be spent either playing with it or bug/troubleshooting it. More parts = more complicated = more places for things to go wrong (ie measuring all that damn fishing line and keeping all the parts taught for no slippage seems so excessive).
OK, so i need to order my free PIC chips, a control setup for programming the chip, and actual parts. Bend sensors, wire, servos, legos. Oh yeah, i found an interesting lego mannequin hand that i figure would be a good idea to make a skeleton for my robot hand. Either that or i was gonna get either those 4DOF fingers from an android site i found, even though they are RIDICULOUSLY expensive (55$ a finger!). I could start with one finger i guess, thats all thats necessary for a model to duplicate to other fingers. Legos still seem like the easiest, cheapest option. Thats a pretty short list, eh?
I really hope i can shorten those bend sensors so i can use them on each individual joint. That was why i wanted pots, because i could use as many as i needed, even if they were gonna be a bit...unwieldy and difficult to maintain. Shortening those is my first email...
OK emails fired (approx. time spent between last sentence and this one: 10 mins)
OK now to find if i can get velostat online... i can! w00t ok gtg
{kind=link}
{kind=link}
Subscribe to:
Post Comments (Atom)
No comments:
Post a Comment